 Nederlands
Nederlands



MOTOR EIGENSCHAPPEN
■ Functies van de inductiemotor
1 、 Over het algemeen verwijst Micro-inductiemotor naar de motor die door de inductie wordt gedraaid. Inductiemotor vertrouwt op condensator en elektromagnetisme bij het starten en draaien. Hoewel het startkoppel niet erg hoog is, heeft het een eenvoudige structuur, een hoog rendement en kan het blijven draaien.
2, De enkelfasige motor heeft een omgekeerde richting met de roterende motor wanneer deze wordt bediend. Pis verandert de draairichting van de eenfasige motor pas nadat de motor tot stilstand is gebracht.
3, driefasige motor is afhankelijk van driefasige voeding. Het heeft een hoog rendement en kan een hoog startkoppel krijgen.
■ Omkeerbare motoreigenschappen
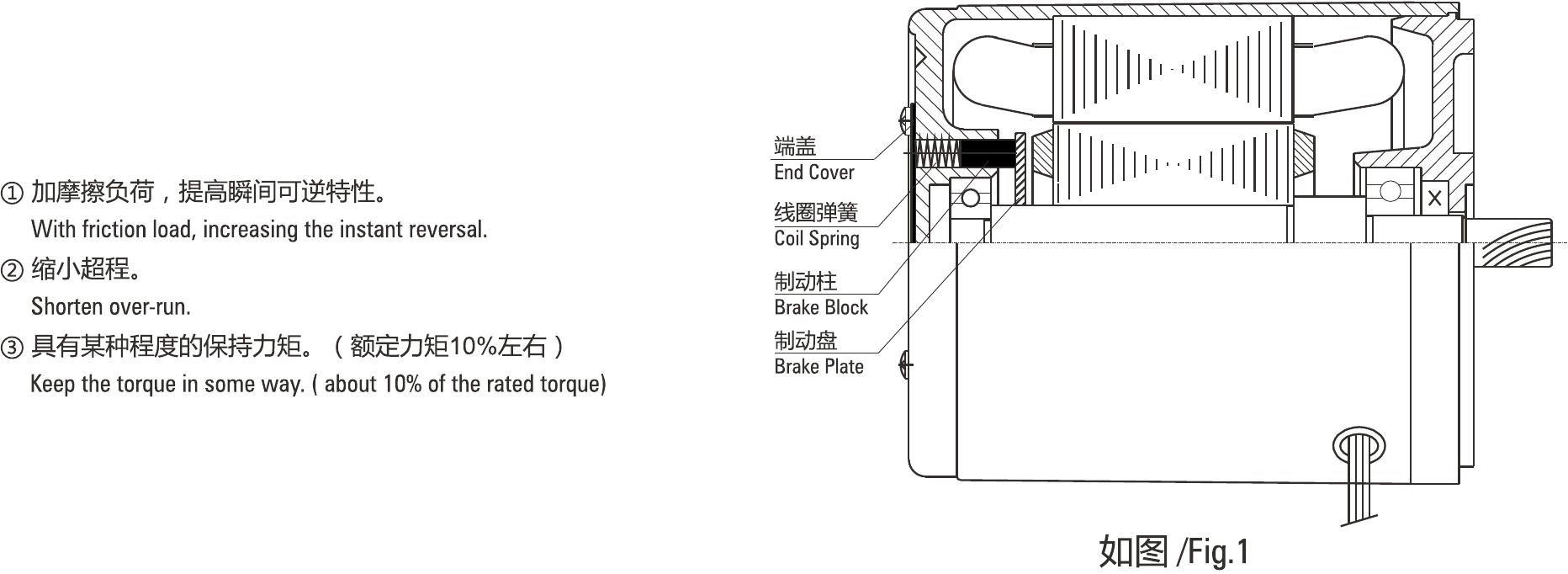
1, omkeerbare motor heeft een wrijvingsrem aan de achterkant van de motorbehuizing, die is ontworpen voor toepassingen waarbij vaak de richting moet worden omgedraaid. Controleer voor de frictierem Draw 1. Het vocht met veer komt in aanraking met de draaiende remschijf en levert met continue pers. De functies van de wrijvingsrem zijn als volgt:
2 、 Het aanhoudkoppel of meer van de wrijvingsrem en de overloop staan vermeld in tabel 1. Het is alleen ter referentie. Omdat het zal veranderen volgens de rotatieperiode en de temperatuur. Houd er ook rekening mee dat het koppel bij de eerste bediening iets lager kan zijn dan in de tabel wordt vermeld.
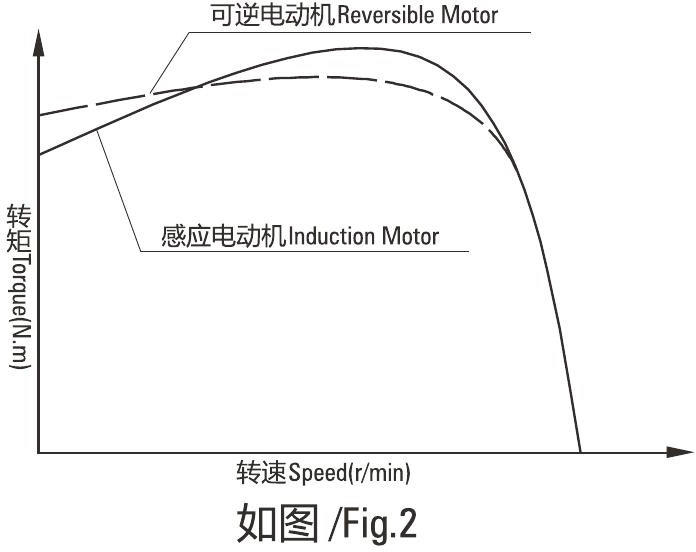
3 、 De omkeerbare motor wordt, net als de inductiemotor, gestart door de condensator en heeft dezelfde koppelkarakteristiek als de inductiemotor. Maar de omkeerbare motor is ontworpen met een hoger startkoppel om de onmiddellijke omkeerfuncties te vergroten. Pls check tekening 2.
■ Tabel 1. Houd koppel en overloop behouden
| Fase | Grootte | Uitvoer | Motormodel | Houd koppel | Overschrijding | |
| mm | W | N. cm | Kgf.cm | Cycli | ||
| Zing-fase | 60 | 6 | 2RK6 | 0.5 | 0.05 | 4 |
| 70 | 15 | 3RK15 | 1.3 | 0.13 | 5 | |
| 80 | 25 | 4RK25 | 1.5 | 0.14 | 5 | |
| 90 | 40 | 5RK40 | 4.0 | 0.40 | 6 | |
| 60 | 5RK60 | |||||
| 90 | 5RK90 | |||||
| 120 | 5RK120 | |||||
■ Uitgeschakeld Geactiveerd type elektromagnetische remmotorfuncties
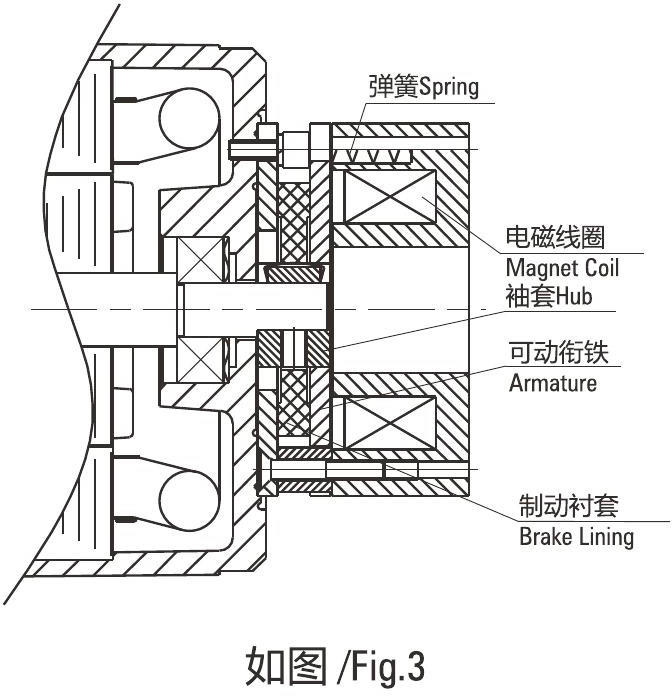
1, structuur en werkingsprincipe
Tabel 3 is de structuur voor de elektromagnetische remmotor. We produceren het Power Off Activated Type. Door de spanning op de wikkeling uit te oefenen, zal het het anker magnetiseren dat door de veer wordt ingedrukt. De motor bevindt zich in een rotatiefase, wanneer er een speling is tussen het anker en de remvelg. Zodra de wikkelspanning is verlaagd, drukt het anker onder invloed van de veer op de remrand, waardoor een remkracht ontstaat. Dan komt de motor tot stilstand.
2, de kenmerken van de elektromagnetische rem
Het is een AC Power Off-geactiveerde elektromagnetische rem die rechtstreeks op de motor is aangesloten. Het stopt met knipperen en houdt de belasting vast wanneer de voeding is uitgeschakeld. Het houdt het koppel tussen 0,05-2,0 N.m. Het is vooral geschikt voor de veiligheidsrem in het geval van onbewust uitschakelen. Het elektromagnetische apparaat kan vaak van richting veranderen. Het kan 6 keer per minuut worden gestopt. Maar zorg ervoor dat het 3 seconden of langer duurt.
Nadat we een commuterende lus in de rem hebben geplaatst, kan deze de voeding delen met de motor.
※ De waarde is standaard. Het zal veranderen in een andere toestand. Zorg er bij daadwerkelijk gebruik voor dat de oppervlaktetemperatuur van de motor lager is dan 90 ° C.
3 、 De functies voor de starttijd en remtijd
De starttijd is de tijd voor de starttijd van de motor plus de elektromagnetische remlostijd. De remtijd betekent de tijd vanaf de stroomonderbreking tot het moment waarop de motor volledig tot stilstand is gekomen. De nalooptijd, starttijd en remtijd zijn afhankelijk van de verschillende toepassingen.
■ Tabel 2. Elektromagnetische rem (door stroom uitgeschakeld geactiveerd type)
| Fase | Grootte uitvoer | Spanning V. | Frequentie Hz | Huidige A | Voer W in | Houd koppel | Overschrijding | ||
| MM | W | N. cm | Kgf.cm | Cycli | |||||
| 1Phase | 70 | 15 | 110 120 220 230 | 50/60 | 0.091 | 8.2 | 0.5 | 50 | 3.5 |
| 80 | 25 | ||||||||
| 90 | 40 | ||||||||
| 60 | |||||||||
| 0.111 | 10.0 | 1.0 | 100 | ||||||
| 90 | |||||||||
| 120 | |||||||||
| 100 | 120 | ||||||||
| 140 | |||||||||
| 200 | 0.144 | 13.0 | 2.0 | 200 | |||||
| 3 fases | 60 | 6 | 220 ~ 230 | 50/60 | 0.073 | 6.6 | 0.25 | 25 | |
| 70 | 15 | 380 ~ 415 | 0.037 | 6.6 | 0.25 | 25 | |||
| 80 | 25 | 200 ~ 230 380 ~ 415 | 0.091 | 8.2 | 0.5 | 50 | |||
| 90 | 40 | ||||||||
| 60 | 0.046 | 8.2 | 0.5 | 50 | |||||
| 90 | 200 ~ 230 380 ~ 415 | 0.111 | 10.0 | 1.0 | 100 | ||||
| 120 | |||||||||
| 100 | 120 | 0.056 | 10.0 | 1.0 | 100 | ||||
| 140 | |||||||||
| 200 | 200 ~ 230 380 ~ 415 | 0.144 | 13.0 | 2.0 | 200 | ||||
| 0.144 | 13.0 | 2.0 | 200 | ||||||
■ De kenmerken van de snelheidsregelmotor
1 、 Het is een eenheid van de controller en motor. Het hoeft maar één keer te worden aangesloten. De snelheid is eenvoudig in te stellen met de potmeter. De controller is bevestigd met snelheidsregellus, condensator, snelheidsregeling en enz. Er is geen functie van onmiddellijke stop in de unit.
2 、 De controller kan de snelheid variabel maken tussen 90-1350 tpm bij 50 Hz en 90-1650 tpm bij 60 Hz.
3. Laat de motor niet langdurig op lage snelheid draaien om oververhitting te vermijden











